Red Maple: How Quebec’s forests are adapting to climate change
Climate change is already affecting Quebec’s forests, with expected impacts on tre …
DroneXperts
Natural Sciences and Engineering Research Council of Canada (NSERC) Partnership Engagement Grant (PEG)
This applied research project aimed to improve georeferencing for forest mapping and increase the accuracy of data collected by drone.
Resource management
Environmental monitoring
Climate change is already affecting Quebec’s forests, with expected impacts on tre …
The CGQ team aims to provide CMQuébec, as well as its regional and local partners, …
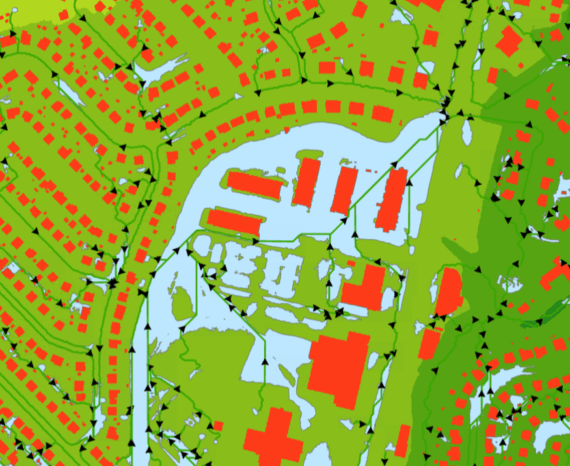
This project involves conducting a campaign to acquire, process, and analyze hyper …